


I. Overview
“Visual perception, a primary source of information for a human, is the ability to interpret the surrounding environment through the visual system.”

Characteristics of human intelligence
•
Hierarchical & sparse neurons
•
Multisensory & multimodal data processsing
•
Independent, but flexible knowledge interaction
We focus on building human-like visual systems by collaboratively and interactively leveraging semantic and geometric knowledge, and understanding fundamental machine learning techniques such as self-supervised learning, multimodal learning, one-shot learning, domain adaptation, meta learning, active learning, etc.
II. Semantic perception
•
Object detection and recognition
•
Semantic segmentation, instance segmentation, video segmentation
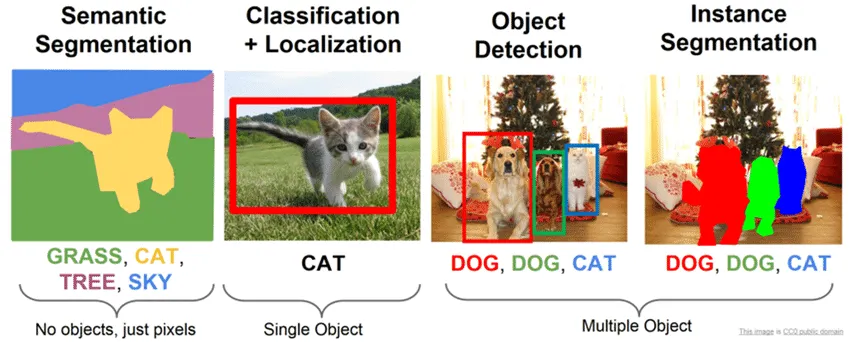
>> Comparison of semantic segmentation, classification and localization, object detection and instance segmentation (Li, Johnson and Yeung, 2017)


Related publications
1.
S. Lee, J. Kim, J.S. Yoon, S. Shin, O. Bailo, N. Kim, T.H. Lee, H.S. Hong, S.H. Han, and I.S. Kweon, ”VPGNet: Vanishing Point Guided Network for Lane and Road Marking Detection and Recognition", IEEE International Conference on Computer Vision (ICCV) 2017. Detection Dataset Multi-task learning
2.
J. Kim, S. Lee, T.H. Oh, and I.S. Kweon, “Co-domain Embedding using Deep Quadruplet Networks for Unseen Traffic Sign Recognition”, AAAI Conference on Artificial Intelligence (AAAI) 2018. Classification Few-shot learning
3.
J. Kim, T.H. Oh, S. Lee, F. Pan, and I.S. Kweon, “Variational Prototyping-Encoder: One-Shot Learning with Prototypical Images”, IEEE International Conference on Computer Vision and Pattern Recognition (CVPR) 2019. Classification One-shot learning
4.
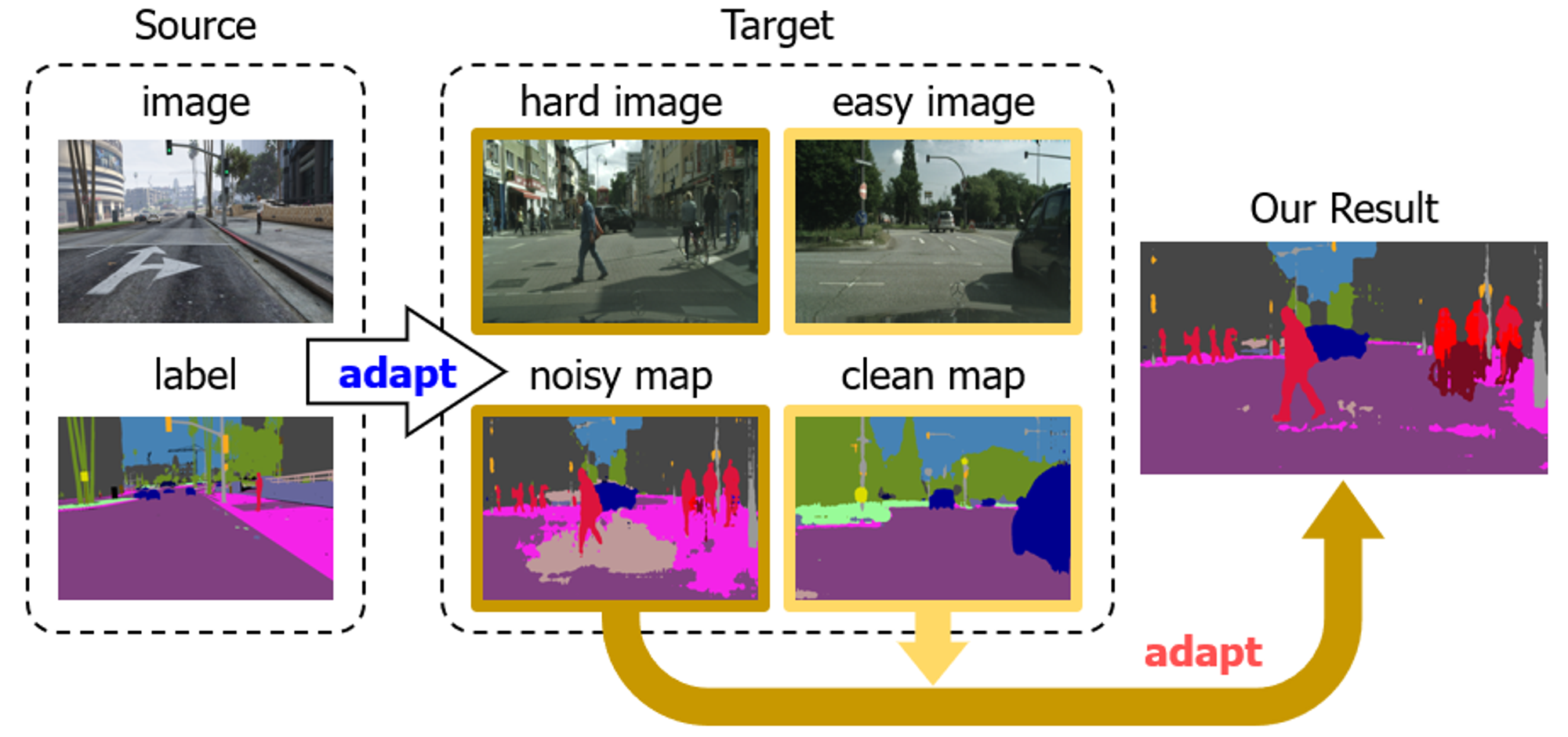
F. Pan, I. Shin, F. Rameau, S. Lee, and I.S. Kweon, “Unsupervised Intra-domain Adaptation for Semantic Segmentation through Self-Supervision”, IEEE International Conference on Computer Vision and Pattern Recognition (CVPR) 2020. Semantic segmentation Domain adaptation
5.
J.S. Yoon, F. Rameau, J. Kim, S. Lee, S. Shin, and I.S. Kweon, “Pixel-Level Matching for Video Object Segmentation using Convolutional Neural Networks”, IEEE International Conference on Computer Vision (ICCV) 2017. Video object segmentation
6.
O. Bailo, S. Lee, F. Rameau, J.S. Yoon, and I.S. Kweon, “Robust Road Marking Detection and Recognition Using Density-Based Grouping and Machine Learning Techniques”, IEEE Winter Conference on Applications of Computer Vision (WACV) 2017. Detection
III. 3D visual perception
•
Monocular depth and motion estimation
•
Correspondence problem: stereo matching, optical flow
•
3D reconstrcution, visual odometry, simultaneous localization and mapping (SLAM)
•
Neural radiance fields (NeRF)
Related publications
1.
S. Lee, F. Rameau, F. Pan, and I.S. Kweon, ”Attentive and Contrastive Learning for Joint Depth and Motion Field Estimation", IEEE International Conference on Computer Vision (ICCV) 2021. monocular depth self-supervised learning
2.
S. Lee, S. Im, S. Lin, and I.S. Kweon, “Learning Monocular Depth in Dynamic Scenes via Instance-Aware Projection Consistency”, AAAI Conference on Artificial Intelligence (AAAI) 2021. monocular depth self-supervised learning
3.
U. Shin, K. Lee, S. Lee, and I.S. Kweon, “Self-supervised Depth and Ego-motion Estimation for Monocular Thermal Video Using Multi-spectral Consistency Loss”, IEEE Robotics and Automation Letters (RA-L) 2022. monocular depth sensor fusion self-supervised learning
4.
S. Lee, S. Im, S. Lin, and I.S. Kweon, “Learning Residual Flow as Dynamic Motion from Stereo Videos”, IEEE International Conference on Intelligent Robots and Systems (IROS) 2019. optical flow self-supervised learning
5.
A. Bangunharcana, J.W. Cho, S. Lee, I.S. Kweon, K.S. Kim, and S. Kim, ”Correlate-and-Excite: Real-Time Stereo Matching via Guided Cost Volume Excitation”, IEEE International Conference on Intelligent Robots and Systems (IROS) 2021. stereo matching
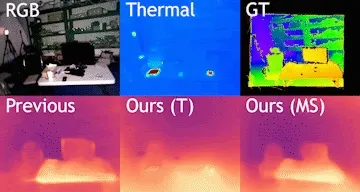
IV. Multimodal learning
“Vision + X” for Y


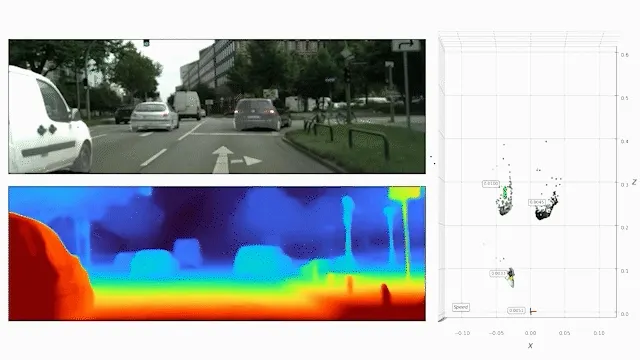
>> Left: RGB+ thermal (depth estimation)
>> Right: RGB + LiDAR (object detection)
>> Bottom: RGB + drone motion (autoencoder)
.gif&blockId=2619f70c-34d7-8005-89a3-d1e2349bd0c6)
.gif&blockId=2619f70c-34d7-800e-a450-defa972a8a80)
.gif&blockId=2619f70c-34d7-8014-b0b8-de8d1beef818)
Modalities (=X) that we are interested in :
•
Language
•
Thermal camera
•
Event camera
•
LiDAR
•
Motion
•
Audio
Applications (=Y) that we are intersted in :
•
Scene understanding
◦
Object detection, 3D perception, segmetation, etc.
•
View synthesis, viewpoint manipulation, 3D rendering
•
Representation/transfer Learning